<a href='https://openx.eetop.cn/www/delivery/ck.php?n=ab347045&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://openx.eetop.cn/www/delivery/avw.php?zoneid=15&cb=INSERT_RANDOM_NUMBER_HERE&n=ab347045' border='0' alt='' /></a>
文章
日志
帖子
首页
论坛
博客
大讲堂
人才网
直播课
资讯
全部
通信/手机
综合电子
测试测量
半导体/EDA
微处理器
模拟/电源
可编程逻辑
嵌入式
汽车电子
医疗电子
工业电子
物联网
可穿戴
机器人/飞行器
其他科技
传感器/Mems
射频微波
人工智能
技术文章
全部
通信/手机
综合电子
测试测量
半导体/EDA
微处理器
模拟/电源
可编程逻辑
嵌入式
汽车电子
医疗电子
工业电子
物联网
可穿戴
机器人/飞行器
其他科技
传感器/Mems
射频微波
人工智能
频道
通信/手机
综合电子
测试测量
半导体/EDA
微处理器
模拟/电源
可编程逻辑
嵌入式
汽车电子
医疗电子
工业电子
物联网
可穿戴
机器人/飞行器
其他科技
传感器/Mems
射频微波
人工智能
登录
注册
创芯云服务 :
创芯大讲堂
|
创芯人才网 |
数字IC职业培训
EETOP诚邀线上IC培训讲师!
资讯
>
传感器/Mems
>
内容
大联大世平集团推出基于Intel技术的双目VSLAM空间定位解决方案
2019-12-06 08:59:38
来源:
大联大
2019年12月5日,致力于亚太地区市场的领先
半导体
元器件分销商---
大联大控股
宣布,其旗下世平推出基于
英特尔
(Intel)Movidius Myriad 2的双目VSLAM空间定位解决方案。
SLAM(simultaneous localization and mapping)即时定位与地图构建技术最早应用在军事(核潜艇的海底定位)上,主要传感器是军用雷达。该技术发展至今已历经几十年,目前以激光雷达作为主要传感器的SLAM技术更加稳定和可靠,依然是当下主流的技术方案。随着近几年计算机视觉技术的快速发展,SLAM技术越来越多地应用于家用机器人、无人机和AR设备等,基于视觉的Visual SLAM(简称VSLAM)也逐渐开始崭露头角。
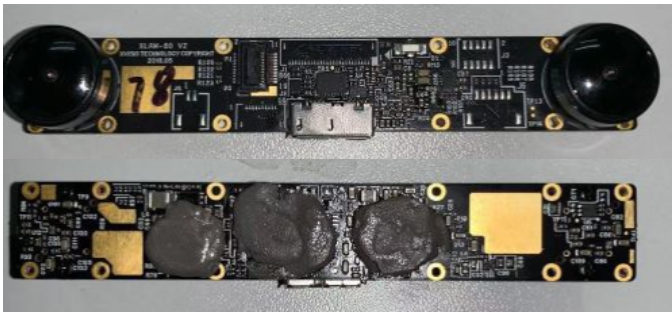
图示1-大联大世平推出基于Intel技术的双目VSLAM空间定位解决方案的展示板图
VSLAM技术框架主要包括:传感器数据预处理、前端、后端、回环检测和建图。由大联大世平推出基于Intel Movidius Myriad 2的空间定位解决方案采用的eXLAM-80TOF是独立的双目VSLAM模组,通过USB3.0接口传输,体积小巧,可以嵌入到机器人应用中并提供定制开发。本方案可应用于AR / VR、扫地机器人等行业中,使产品不仅具有空间定位和导航能力,并且更智能、更实用。
eXLAM-80TOF模组在标准的双目帧率高达100Hz毫米级精度的SLAM服务上又增加了TOF深度摄像头方案,提供224x172的深度分辨率,帧率最高可达100Fps,识别深度达到5m+,并且无需依赖Host端计算,可直接输出深度数据和点云数据,用于3D重建、距离
测量
、导航避障,手势识别等。eXLAM-80TOF双目模组能够让普通机器人插上
AI
的翅膀,实现更多功能。
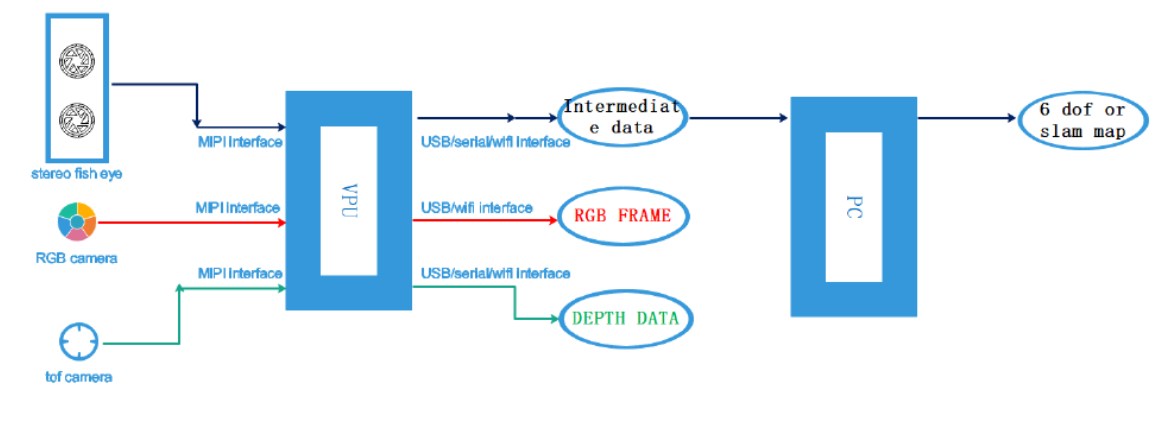
图示2-大联大世平推出基于Intel技术的双目VSLAM空间定位解决方案的方案块图
核心技术优势
具有全面校准系统的SOM模组解决方案
稳定的6DOF追踪性能,设备深度输出可达100Hz
立体视觉定位建图,瞬时初始化,并保持真实世界的缩放比例
追踪精度和稳定性达到毫米级别
多功能接口:标配:USB;可选项:MIPI、SPI、I2C、WIFI、蓝牙、SDIO、UIRT
既可脱机工作也可连接WIFI进入网络工作模式
可扩展且灵活地定制速度和精度
由Intel Movidius垂直一体化供电
低功耗
方案规格
VPU:Intel Movidius平台
IMU:9 axis IMU
摄像机基准线:80mm
摄像机配置:640 X 400帧曝光
摄像机帧率:100 fps
摄像机FOV:(H / V)150° / 112°
默认输出接口:USB 3.0
MIPI输出端口:2 Lane CSI2(可选)
无线网络 / 蓝牙 / SPI / SDIO输(可选)
尺寸:17.8 X 19.4 X 110.4(mm)
功耗:< 2W
基于较少特征点的SLAM
基于立体视觉和IMU的混合定位
6DOF输出高达100Hz
可选的稀少阴影点,其深度输出可达100Hz
毫米级的追踪精度
转变抖动小于1mm
旋转抖动小于1度
大面积的追踪覆盖或可延伸的内存访问
关键词:
大联大
Intel
EETOP 官方微信
创芯大讲堂 在线教育
创芯老字号 半导体快讯
相关文章
上一篇:
艾迈斯半导体推出的新款温度传感器兼顾
下一篇:
艾迈斯半导体针对高速电机应用推出首款
延伸阅读
大联大友尚集团推出基于ST产品的社交距离感测器解决方案
大联大诠鼎集团推出基于RICHTEK产品的Type-C PD电源扩展坞方案
大联大友尚集团推出基于ST产品的超声波氧气浓度传感器模块方案
大联大诠鼎集团推出基于NOVATEK和思特威产品的安防监控方案
全部评论
最新资讯
最热资讯
华为Pura 70 跑分曝光
电动压缩机设计-ASPM模块篇
实现机器人操作系统——ADI Trinamic电机
瑞萨推出兼顾超低功耗和卓越25fs-rms抖动性
EA电源为中汽研客户验证新能源汽车的高压安
阿斯麦High-NA EUV光刻机取得重大突破,成
ASML发布Q1财报
e络盟发售来自Weller的最新WXsmart焊接套件
薪资谈判破裂,员工集体行动!
统明亮光电科技加盟艾迈斯欧司朗结合智能RG
三家存储巨头宣布涨价!
中国区裁员远超10%!
中国区裁员远超10%!
贸泽推出2024全新一期 EIT 系列 探索机器视觉的无限潜力
大联大世平集团推出基于onsemi、NXP以及ams OSRAM产品的汽车前照大灯方案
泰克携手EA提供扩展的电源产品组合, 助力工程师实现世界电气化
高带宽电源模块消除高压线路纹波抑制的干扰
适用于工业和交通市场的电感式位置传感器
博泽出席德总理朔尔茨访华德企圆桌,传递对中国市场的坚定信心
性能暴降92%:英特尔中国特供AI芯片曝光
英国着手起草AI法规,确保其发展处于可控状态
华夏芯破产清算
Achronix FPGA增加对Bluespec提供的基于Linux的RISC-V软处理器的支持,以实现可扩展数据处理
实锤:万人大裁员!
业界最热文章
2024中国IC设计Fabless100排行榜公布!
暗夜精彩如白昼 揭秘黑光全彩全天候录
从原理到制造再到应用,这篇文章终于把ME
安森美CEM102模拟前端在贸泽开售 为连
统明亮光电科技加盟艾迈斯欧司朗结合智能
艾迈斯欧司朗首席执行官奥多·坎普来华参
隧道磁阻技术(TMR)及其应用简介
安森美推出面向工业、环境和医疗应用的
适用于工业和交通市场的电感式位置传感器
精准的硅芯片温度检测——显示测量精度为
ScioSense(睿感)推出用于燃气表的超声
如何设计便于部署的10BASE-T1L单对以太网
iPhone X“刘海”深度解析:刷脸全靠它
高管洞察:高分辨率音乐需要高分辨率扬声
MEMS传感器的主要分类和应用领域
PROPHESEE 发布全新事件视觉传感器,超
温度传感器IP 挺进5nm
高性能图像传感器参考设计的核心集成与协
从光子到电子,图像传感器技术简介
高精度数字温度传感器为基于RTD和医疗应
ET创芯网(EETOP)-电子设计论坛、博客、超人气的电子工程师资料分享平台
论坛
博客
大讲堂
人才网
直播课
关于我们
联系我们
隐私声明
@2003-2024 EETOP
京ICP备10050787号
京公网安备:11010502037710